4D моделирование подводных археологических раскопок в условиях плохой видимости с помощью фотограмметрии

Предлагаем вниманию читателей немного сокращенный адаптированный перевод статьи «4D моделирование подводных археологических раскопок в условиях плохой видимости в болгарской части Черного моря с использованием фотограмметрии на основе многокамерной съемки», опубликованной в 2018 году в International Journal of Geological and Environmental Engineering («Международном журнале по инженерной геологии и инженерной защите окружающей среды») известным издательством академических журналов с открытым доступом World Academy of Science, Engineering and Technology («Всемирной академией наук, инженерии и технологий») по лицензии Creative Commom Attribution 4.0 International (CC BY 4.0). Эта лицензия позволяет копировать и распространять материал на любом носителе и в любом формате, адаптировать, видоизменять и использовать в любых целях, включая коммерческие, при указании ссылки на первоисточник. В нашем случае ссылка приведена в конце перевода. Авторами указанной статьи являются Родриго Пачеко-Руис, Джонатан Адамс и Феликс Педротти – сотрудники центра морской археологии Саутгемптонского университета (Великобритания).
В данной статье рассказывается о пользе применения фотограмметрии для подводной съемки археологических объектов для создания 4D моделей. Фотограмметрия применяется на подводных археологических раскопках уже по крайней мере с 1970-х годов, и сегодня создание с ее помощью традиционных 3D моделей становится обычной практикой. Указанный метод, как правило, применяют при ярком освещении и при видимости под водой более 1 м, что снижает возможность его применения для изучения большинства затопленных археологических памятников в более мутной воде. В последние годы цифровые фотосенсоры и оптические технологии были усовершенствованы и стали идеально подходить для более плохой видимости. Такие разработки в сочетании с мощными компьютерными системами для обработки данных позволили успешно использовать фотограмметрию в качестве стандартного инструмента регистрации и интерпретации данных по подводным археологическим раскопкам. В представленной публикации рассказывается о результатах ежедневных подводных съемок раскопов, содержащих археологические объекты возрастом начиная с 3300 года до н. э., в болгарской части Черного моря при видимости менее 0,5 м. Эти съемки выполнялись пятью камерами GoPro5 Hero Black, зафиксированными на одном каркасе, который перемещался под водой аквалангистом.
Полученные результаты показали, что фотограмметрию можно и нужно использовать в качестве одного из основных методов съемки подводных объектов, представляющих интерес в отношении археологии, даже при слабом освещении. Впрочем, с точки зрения редакции «Геоинфо», рассмотренная в статье технология исследований может пригодиться не только для археологических исследований, но и для некоторых видов инженерных изысканий для подводного строительства (археологических, инженерно-геодезических, инженерно-геологических, инженерно-экологических), а также при исследованиях изменений климата и уровня моря по данным археологических раскопок под водой.
ВВЕДЕНИЕ
Среди методов фиксации объектов, выявленных при археологических раскопках, давно стала обязательной фотография наряду с созданием обычных чертежных планов, профилей и разрезов. На основе объединения разных методов уже несколько десятилетий назад начали корректировать стереофотографии. Но для археологических объектов, оказавшихся под водой, все было сложнее. Ухудшение освещенности, потеря цвета и контраста на глубине, усугубляемые любыми взвешенными твердыми частицами, представляют собой набор ограничений, которые долгое время было нелегко преодолеть. Это, безусловно, было так для первого подводного фотографа Луи Бутана (Louis Boutan) в 1890-х годах и даже для Джорджа Басса, который провел первые профессиональные подводные археологические раскопки в 1960 году [1]. Подводное фотографирование археологических памятников, где видимость обычно бывает плохой, представляло собой сложную задачу. В попытках решить ее методом подводной съемки с огромным потенциалом еще в 1970-х годах была признана фотограмметрия [2]. Например, раскопки тюдоровского военного корабля «Мэри Роуз» в Великобритании в 1971–1982 годах сопровождались длительными экспериментами с камерами, объединением изображений, 3D съемками и ранними попытками создания программного обеспечения для 3D фотограмметрии [3, 4].
С тех пор революцию в подводной фотографии и, в частности, в применении фотограмметрических методов при исследованиях археологических раскопок произвели две новые технологии. Цифровая фотография устранила ограничения, связанные как с количеством кадров, которые можно было получить во время погружения, так и с необходимостью проявления пленки, чтобы можно было увидеть результаты. Много дало и развитие программного обеспечения. Запатентованные программные пакеты для фотограмметрии доступны уже много лет, но долгое время они были либо сложны в использовании, либо не обеспечивали необходимой точности. Но за последние 5 лет (к моменту написания статьи в 2018 году. – Ред.) были разработаны простые в использовании программы, дающие очень точные результаты.
В данной работе представлена адаптация фотограмметрии к специфическим условиям подводных археологических раскопок с ограниченной видимостью.
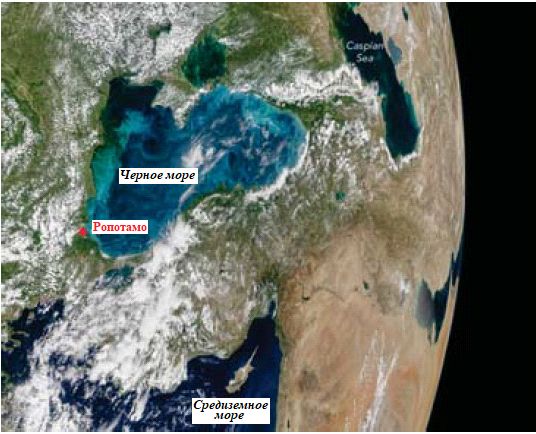
Местом исследований была защищенная бухта Ропотамо в Черном море в Южной Болгарии, где свидетельства приморской жизни людей уходят своими корнями в доисторические времена. Раскопки проводились в рамках долгосрочного международного проекта по морской археологии Черного моря Black Sea MAP (Black Sea Maritime Archaeology Project), посвященного реакции человека на изменения окружающей среды в конце доисторических времен. Помимо раскопок в 2017 году команда Black Sea MAP провела 3 сезона морских геофизических исследований и отбора геологических проб, а также зарегистрировала 65 мест затонувших кораблей на глубине до 2140 м. Основным методом регистрации этих судов была подводная фотограмметрия, и это дало команде обширный опыт в получении изображений с достаточными качеством, разрешением и ориентацией для успешного получения 3D изображений кораблей, затонувших за 2500 лет мореплавания. Именно этот опыт был направлен на решение проблем точной регистрации трехмерных положений и взаимосвязей объектов при исследованиях археологических раскопов в Ропотамо. Это приходилось делать не только в условиях плохой видимости (иногда менее 1 м), но и ежедневно, чтобы не отставать от развития процесса раскопок. Добавление времени к трем пространственным измерениям позволило создавать четырехмерные (4D) модели процесса археологических исследований под водой с высоким разрешением.
ПОДВОДНЫЕ АРХЕОЛОГИЧЕСКИЕ РАСКОПКИ
Место раскопок в бухте Ропотамо представляет собой глубоко стратифицированный объект, представляющий археологический интерес. Накопленные там археологические материалы отражают значительную человеческую деятельность начиная c 3300 года до н. э. и по крайней мере до XVII века н. э. Важность этого места была очевидна с момента первых археологических раскопок, проведенных в 1980-х годах профессором Иваном Караятовым (Ivan Karayatov) [5]. Ропотамо (когда-то – поселение, а затем – гавань) имеет большое значение не только с археологической точки зрения, но и для понимания того, как человеческие сообщества реагировали на климатические изменения, в частности на изменение относительного уровня моря.
С 2015 года в рамках проекта Black Sea MAP, возглавляемого Центром морской археологии Саутгемптонского университета, собираются археологические и палеоэкологические данные в прибрежных и морских зонах. Обоснование необходимости осуществления этого проекта заключалось в том, что выявление процессов и хронологии изменений климата в голоцене расширит понимание того, какое влияние они оказали на человеческие популяции в этом районе в конце доисторических времен.
Морские кампании в рамках указанного проекта помогли обнаружить 65 новых мест кораблекрушений прошлого за почти 2500 лет мореплавания в Черном море начиная с конца V века до н. э. Соответствующие наборы данных были дополнены 92 образцами керна осадочных пород, взятыми на побережье, континентальном шельфе и континентальном склоне, что позволило команде ответить на давно обсуждаемые вопросы о характере затопления суши Черным морем после максимума последнего оледенения (около 22 тыс. лет назад) [6–13].
Подводные раскопки в Ропотамо служили связующим звеном между археологическими находками, недавно обнаруженными остатками затонувших кораблей и богатыми палеоэкологическими наборами данных, собранными к настоящему времени. Цель состояла в том, чтобы детальнейшим образом проследить историю человеческой деятельности в Ропотамо с использованием наборов 4D фотограмметрических данных с высоким разрешением.
Использование фотограмметрии не только позволило вести миллиметровую фиксацию процесса раскопок во времени и пространстве. В процессе этих работ также осваивались новые направления исследований. С точки зрения авторов, это первый случай, когда при подводных раскопках были успешно (с высокими уровнями детализации и точности) зафиксированы ежедневные изменения, то есть было добавлено четвертое измерение.
Рассматриваемые раскопки в Ропотамо выполнялись на основе вышеупомянутой работы Ивана Карайотова [5], который определил важность этого места еще в 1980-х годах, а также благодаря концентрации археологических материалов, найденных до глубины 20 см от уровня морского дна. В соответствии с результатами морских геофизических исследований была очерчена представляющая археологический интерес площадь, в пределах которой было выполнено два раскопа размерами по 5 м х 5 м. Средняя глубина археологических раскопок составила 2,3 м ниже современного среднего уровня Черного моря. В каких-то местах они достигли слоя раннего бронзового века на глубине 5,7 м.
В связи с рыхлым характером морского дна было решено защитить подлежащие раскопкам участки от загрязнения морскими отложениями с помощью двух открытых кессонов размерами по 5 м х 5 м.
При подводных раскопках использовались такие грунтоотсасывающие средства, как водоструйные эжекторы, предназначенные для археологических работ (рис. 1). Отложения, окружающие археологический материал, удалялись руками или ручными инструментами (рис. 2). Как только выявлялся археологический материал, аквалангисты проводили подводную фотограмметрическую съемку раскопов одновременно несколькими камерами. Подводные работы выполнялись специально обученными морскими археологами, имевшими опыт научного и коммерческого дайвинга.

ПОДВОДНЫЕ УСЛОВИЯ
Весной 2017 года в Черном море наблюдалось необычное «цветение» воды, вызванное массовым развитием кокколитофор (рис. 3) (кокколитофоры, или кокколитофориды, – группа морских одноклеточных планктонных водорослей, у большинства из которых имеется наружный скелет из известковых пластинок – кокколитов. – Ред.). Это событие отрицательно сказалось на подводной видимости, превратив раскопки в Ропотамо в сложную среду для подводной фотографии со средней видимостью для камеры менее 0,5 м.
В то время как фотограмметрия под водой широко используется, когда видимость значительно превышает 0,5 м [14, 15], мало что известно о применимости этого метода в вышеуказанных плохих условиях.
По мере улучшения видимости создание фотограмметрических моделей становится все проще. Недостаток же света препятствует получению четких изображений объектов, а ведь четкость имеет решающее значение для создания фотограмметрических моделей хорошего качества. В мутной воде искусственный свет от видеоосветителей или фотовспышек имеет тенденцию генерировать обратное рассеяние, что приводит к передержкам и проблемам с фокусировкой. Более эффективным средством является уменьшение расстояния от камеры до объекта, как это делалось в Ропотамо.
МЕТОДОЛОГИЯ
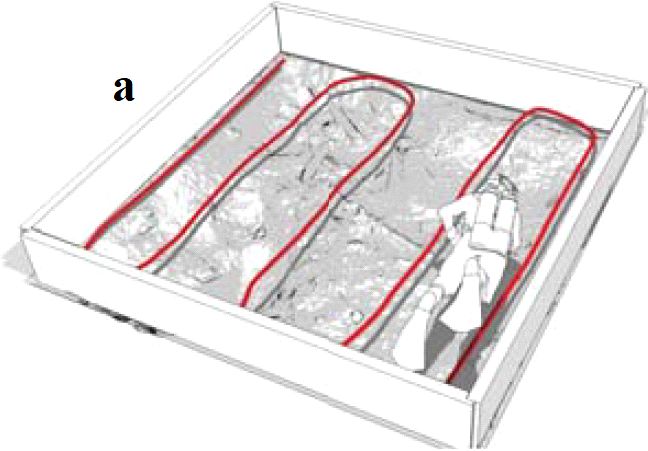
Применение обычных методов фотограмметрии с использованием одной или двух камер в имеющихся условиях плохой видимости было бы недостаточным для достижения целей проекта по ежедневной регистрации каждого раскопа площадью по 25 кв. м. В качестве примера на рисунке 4, а показан охват наблюдаемого пространства для камеры, оснащенной объективом с фокусным расстоянием 35 мм. В качестве альтернативы при видимости менее 50 см изыскатель должен находиться ближе к объекту съемки, уменьшая охват и позволяя меньше перекрывать фотографии, как показано на рисунке 4, б.
Как хорошо известно, фотограмметрический охват трехмерного объекта требует достаточного количества изображений с перекрытиями между соседними снимками. В то время как в воздухе этого можно добиться, перемещая камеру (или лазерный сканер) вокруг объекта, постепенно увеличивая охват, под водой это достигается путем перемещения камеры дайвером над объектом и вокруг него по встречным, круговым или спиралевидным траекториям. Однако изменения места съемки влияют на результаты фотограмметрической обработки. В динамичной подводной среде, такой как активные археологические раскопки, трудно поддерживать «визуальную устойчивость». Взвешенные осадки, пузырьки газа, движение флоры и фауны в толще воды могут изменить изображение морфологии площадки даже в ходе короткой съемки. Они изменяют кажущиеся контуры, оттенки и контрастность объектов и могут привести к получению наборов изображений, многие из которых невозможно совместить друг с другом в зонах перекрытий.
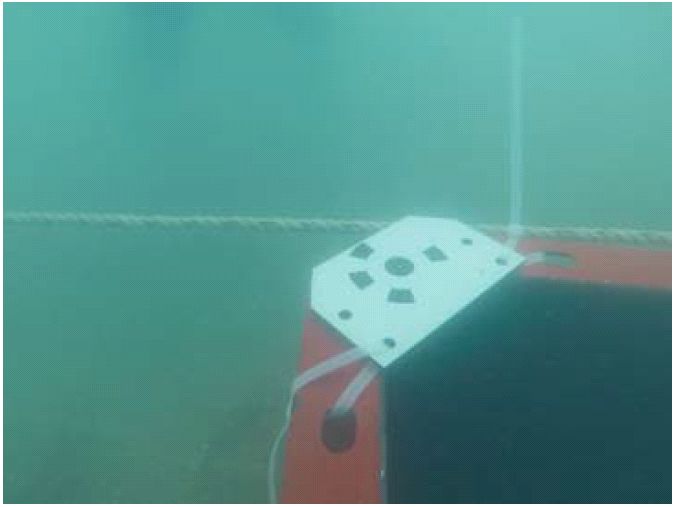
Чтобы преодолеть потенциальные проблемы, связанные с изменением морфологии места съемки, было решено создать установку (достаточно легкую, чтобы любой дайвер мог использовать ее под водой), на которой можно было бы закрепить несколько камер, которые могли бы работать при низкой освещенности и делать фотографии на расстоянии менее 0,5 м, – в данном случае пять камер GoPro Hero 5 Black Edition (рис. 5). Затем такая установка была создана из полилактида (полимолочной кислоты, PLA) на 3D-принтере, а для закрепления на ней камер использовалась шарнирная система, поставляемая с этими камерами. Схематические изображения данной установки показаны на рисунке 6.

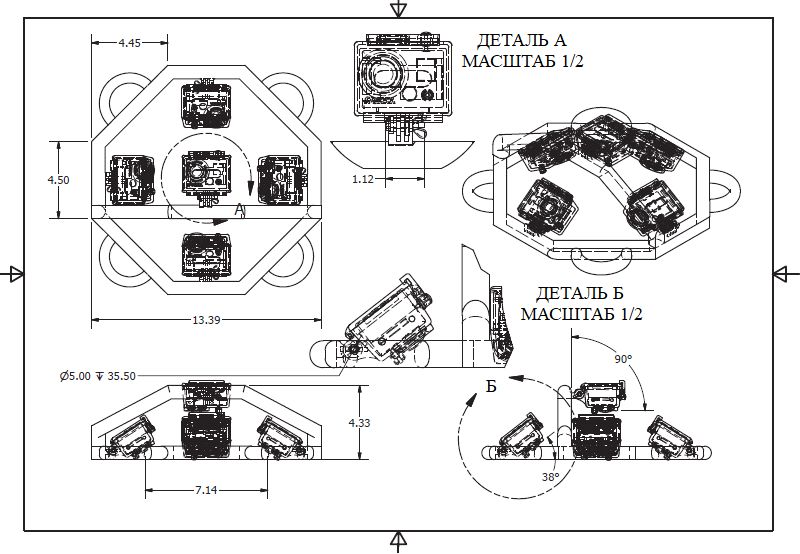
Пять камер устанавливались на изготовленной на 3D-принтере конструкции следующим образом. Четыре камеры прикреплялись по краям установки на равных расстояниях друг от друга. Противостоящие камеры в каждой из двух пар (см. рис. 6) были направлены внутрь под углом 38 град. вниз от горизонтали. Пятая камера закреплялась посередине установки и была обращена вертикально вниз. Угол обзора всех камер обеспечивал перекрытие снимков. Расположение и угол наклона камер на установке были наилучшими для их фокусного расстояния 3 мм. Перекрытие поля обзора (FOV) каждой камеры с полями обзора всех четырех других не только обеспечивало 100%-ный охват исследуемой поверхности и существенное перекрытие снимков, но и в значительной степени устраняло проблемы, вызванные изменениями морфологии площадки, о которых говорилось выше.
Стратегия съемки
За счет применения созданной на 3D-принтере установки были увеличены время съемки и охват исследуемой поверхности. Пять камер одновременно делали по снимку с разрешением 4000 x 3000 пикселей каждые 2 секунды, используя присущую этим камерам функцию Time Lapse («серийная покадровая съемка с временным интервалом»). Оператор плавал по определенным траекториям, а не просто вокруг объекта, как это часто бывает при обычной подводной фотограмметрической съемке, и объект был полностью отснят сверху, спереди, сзади, слева и справа. Преимущество этого метода заключалось в том, что он не только сводил к минимуму время фотограмметрической съемки, но и помогал дайверу выдерживать курс съемки и, следовательно, избегать путаницы в условиях плохой видимости.
Поскольку эта методика тестировалась во время кампании, был проведен ряд испытаний для разработки идеальной траектории съемки. Первоначально использовалась трансектная траектория: дайвер, управлявший съемочной установкой, плавал взад и вперед по запланированным параллельным трансектам, чтобы сделать достаточное количество снимков для обеспечения перекрытий между ними более чем на 50% (рис. 7, а). Хотя этот метод мог бы обеспечить достаточный охват площадки в условиях подводной видимости более 1 м, он не позволял последовательно отображать панели кессонов. А это было важно, поскольку открытый кессон площадью ровно 25 кв. м использовался не только для защиты, но и для географической привязки и масштабирования каждого раскопа.
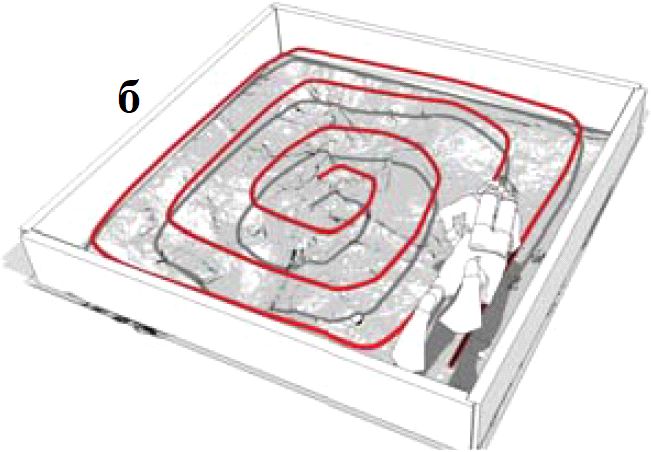
Поэтому был необходим альтернативный метод для сбора фотограмметрических данных при видимости менее 0,5 м. Наиболее эффективным посчитали обследование площадки по спирали, как показано на рисунке 7, б. Это действительно оказалось более успешным в условиях плохой видимости, поскольку обеспечивалась повышенная «непрерывность» съемки с перекрытием снимков более чем на 50%, что, в свою очередь, облегчило последовательность обработки и совмещения изображений по перекрытиям в программе Agisoft PhotoScan Pro.
ОБРАБОТКА ДАННЫХ И МОДЕЛИРОВАНИЕ
В день каждой съемки фотографии передавались на обработку, для которой использовались две рабочие станции (два компьютера) Dell Precision Tower 7810. Вычислительная мощность процессора каждой из них обеспечивалась 16 ядрами (2 x Intel(R) Xeon(R) CPU E5-2699 v3 @ 2,30 ГГц) с дополнительными 192 ГБ оперативной памяти, в то время как обработка графической информации обеспечивалась видеокартой NVIDIA Quadro 6000 для каждого компьютера. Эти устройства были опробованы командой ранее во время двух морских исследований на борту судна MPSV Stril Explorer, а затем на борту MPSV Havila Subsea уже во время выполнения проекта Black Sea MAP в 2016 и 2017 годах. Обработка выполнялась с использованием программы Agisoft PhotoScan Pro version 1.3.2 build 4206.
В общей сложности с 8 по 27 июня 2017 года было сделано 80128 снимков. Обработка проводилась после каждой дневной съемки в течение ночи. Она была автоматизирована с помощью скрипта на языке Python, разработанного для выполнения последовательных фотограмметрических рабочих процессов, которые совмещали снимки по перекрытиям, а также оптимизировали положение и настройки камер, применяли предварительно откалиброванные настройки, создавали плотное облако точек, генерировали триангуляционную сетку Делоне (Delauney) и вычисляли текстуру всей поверхности для пересмотра результатов перед следующей съемкой.
Для раскопа 1 было выполнено 15 съемок. Среднее количество снимков за съемку составило 2263, количество точек фотографирования (позиций камер) – 1293, общих точек (точек привязки) для соседних изображений – 963072.
Для раскопа 2 было выполнено 19 съемок. Среднее количество снимков за съемку составило 2430, количество точек фотографирования – 2037, общих точек (точек привязки) для соседних изображений – 1376644.
В целом за съемку каждого раскопа охватывалось 25 кв. м со средним разрешением 0,223 мм на пиксель (1,13 мкм х 1,13 мкм) со средней высоты 37,12 см от морского дна.
В результате в общей сложности было получено 58124 совмещений снимков и 40602335 общих точек (точек привязки) для соседних изображений.
Географическая привязка и масштабирование
Географическая привязка наборов 4D фотограмметрических данных была выполнена с использованием углов и стыков 2,5-метровых панелей кессонов, которые окружали раскопы размерами по 5 м x 5 м. Благодаря небольшой глубине каждого из двух таких участков можно было использовать тахеометр Leica FlexLine TS06plus с тахеометрической дальномерной рейкой длиной 3 м с отражателем для определения произвольных положений (x, y, z) углов. Отражатель располагался вертикально над целью и удерживался на месте дайверами, в то время как направление и расстояние измерялись геодезистами с четырех разных станций на берегу (рис. 8). Впоследствии каждой береговой станции было присвоено географическое местоположение в зоне 35N системы координат UTM с использованием системы кинематического позиционирования в реальном времени DGPS.

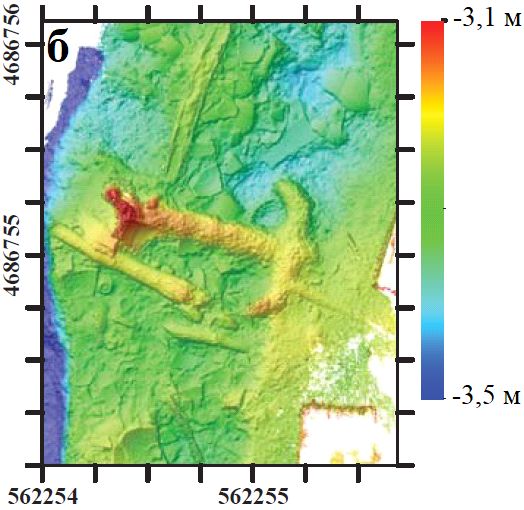
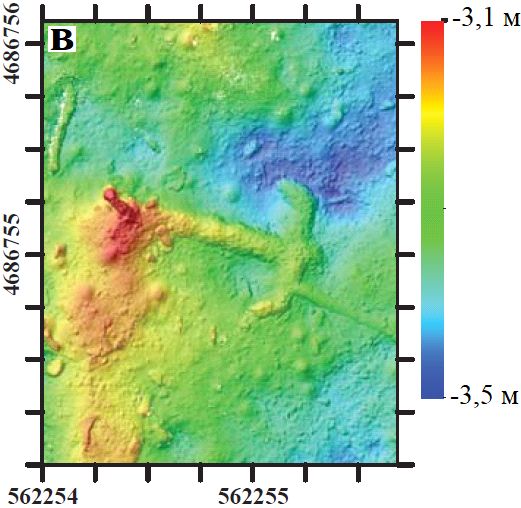
Напомним, что 4D моделирование учитывает изменения в пространстве и времени. Поскольку цель рассматриваемых исследований состояла в том, чтобы изучить 2 археологических раскопа со 100% охватом, ключевым фактором успеха была точная регистрация данных во времени и пространстве. Очень эффективным способом сохранения общих привязок (постоянных точек отсчета) для многочисленных съемок оказалось использование углов неподвижных панелей каждого из раскопов (рис. 9). Чтобы расширить возможности фотограмметрического совмещения снимков с помощью программы Agisoft PhotoScan Pro, было также решено разместить маркеры программы Agisoft Photoscan Pro на внутренних гранях и в верхних углах панелей, как показано на рисунке 10, поскольку они автоматически распознаются этой программой. Поэтому панели кессонов должны были быть частью исследования вместе с чисто археологическими. По мере продвижения работ по раскопкам некоторые археологические объекты также функционировали как дополнительные точки привязки для масштабирования и географической коррекции. Одним из содержащих такие точки объектов был византийский якорь, аналогичный тем, что были найдены на затонувшем корабле Tantura F начала VIII века н. э. [16, 17] (рис. 11).
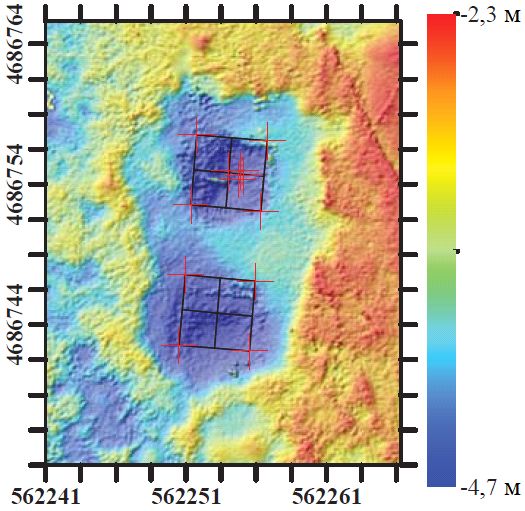
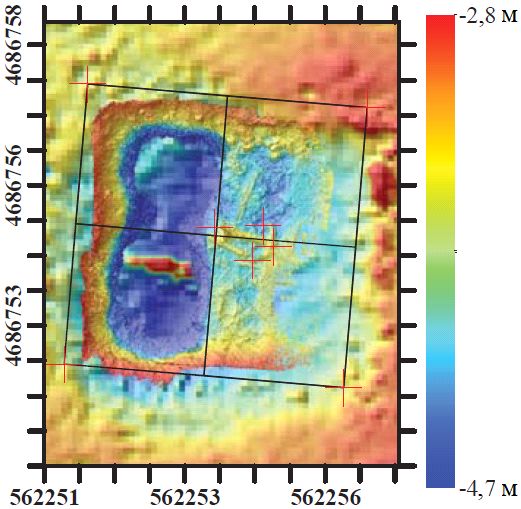
Масштабирование было выполнено путем ввода известных размеров панелей кессона в каждую из фотограмметрических моделей. Второй независимый способ масштабирования моделей заключался в трилатерации расстояний между всеми метками и определении их 3D координат с использованием программы DSM (Direct Survey Method), широко используемой в морской археологии [18]. Третий, и последний, метод использовался в качестве подстраховки для масштабирования и географической привязки моделей путем сравнения полученных 4D фотограмметрических моделей с результатами батиметрической многолучевой съемки залива Ропотамо, проведенной после завершения раскопок. На рисунке 11 показана корреляция фотограмметрических моделей и результатов батиметрической многолучевой съемки.
Рабочие наборы данных
Таким образом, наборы 4D фотограмметрической информации по подводным археологическим раскопкам в Ропотамо в 2017 году состояли из комбинации разных типов входных данных. Во-первых, велась пространственно-временная запись каждого этапа археологических раскопок с использованием фотограмметрии высокого разрешения по данным от разных камер. Во-вторых, выполнялось внедрение методов геолокации и масштабирования для корреляции таких наборов данных в пространстве и времени с использованием методов кинематики в реальном времени (RTK), тахеометров, непосредственного обследования и соответствующей программы (DSM – Direct Survey Method), а также сравнения полученных данных с результатами многолучевой батиметрической съемки, проведенной по окончании выполнения программы раскопок.
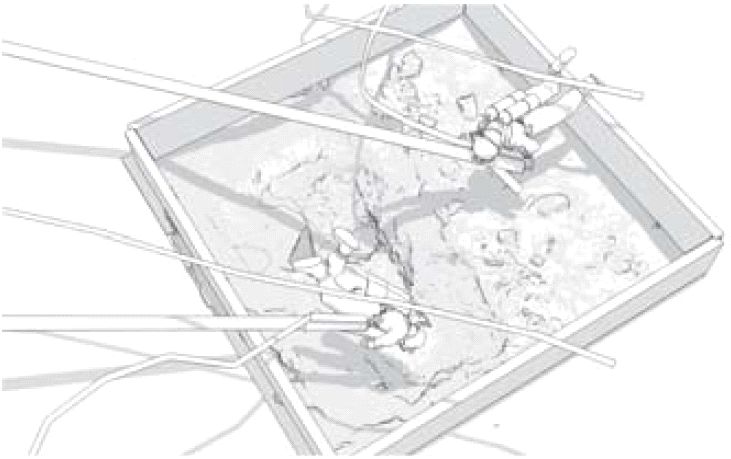
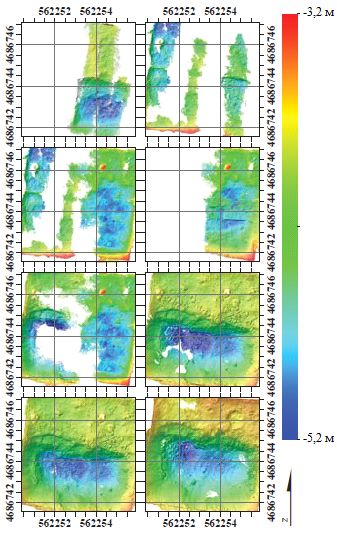
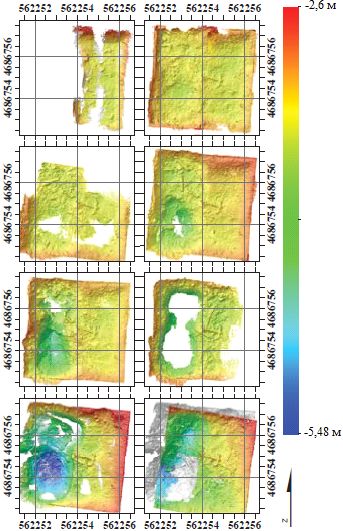
В результате такого комбинирования было получено 16 трехмерных записей раскопов 1 и 2, которые при добавлении такого параметра, как время, создали две 4D модели каждого раскопа. На рисунках 12 и 13 показаны результаты съемки на каждом этапе. Команде было ясно, что использование 4D моделирования имело преимущество в том, что оно фокусировалось на сложности регистрации археологических данных и в меньшей степени на методах регистрации.
Многие результаты были получены благодаря использованию таких наборов данных в качестве инструментов интерпретации. Во-первых, можно было количественно оценить скорость процесса раскопок, а это увеличивало документацию по любому конкретному археологическому вмешательству и его последующему анализу в лаборатории. Другими словами, 4D моделирование помогало отслеживать разные этапы раскопок благодаря высокой скорости обработки данных, что, в свою очередь, позволяло принимать более обоснованные решения по оптимизации хода полевых работ и управлению ими. Однако более важной была возможность детальнее изучить площадку и лучше понять природу отложений в археологическом отношении. Возможность возвращаться к каждому этапу раскопок, фактически перемещаясь назад и вперед во времени, значительно помогла понять процессы формирования изучаемых мест с помощью интерпретаций: каждый обнаруженный и смоделированный слой позволял формулировать идеи и итеративно уточнять их.
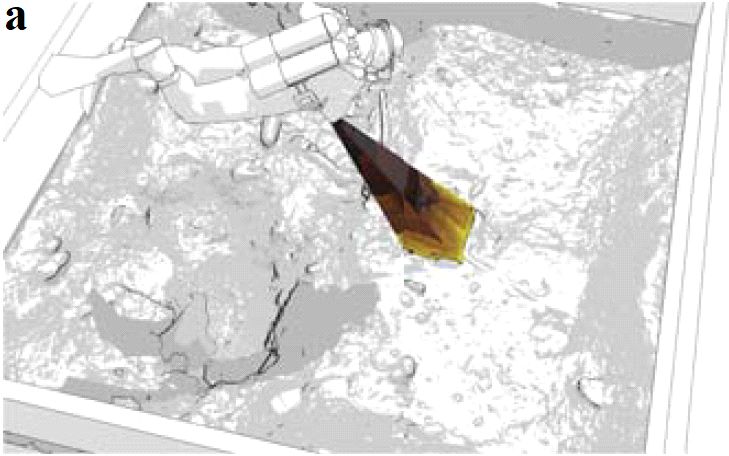
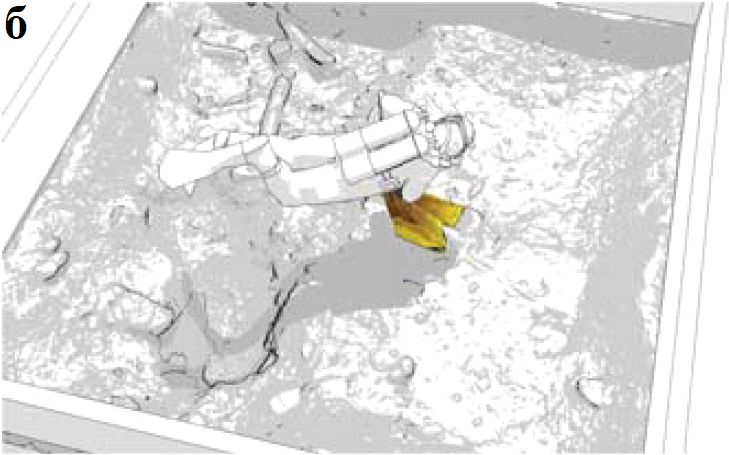
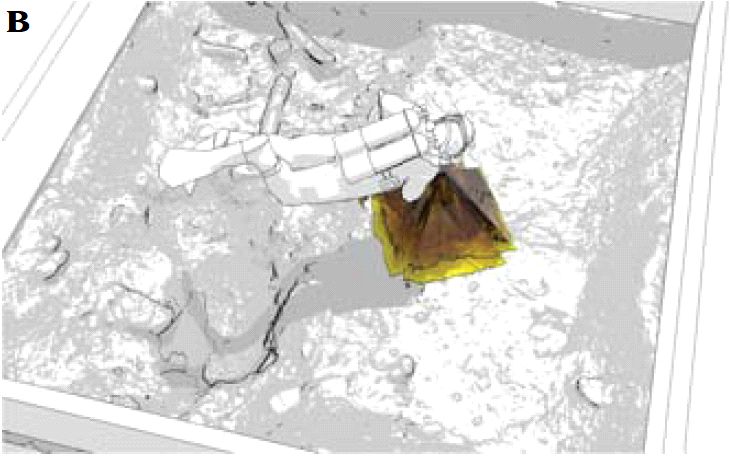
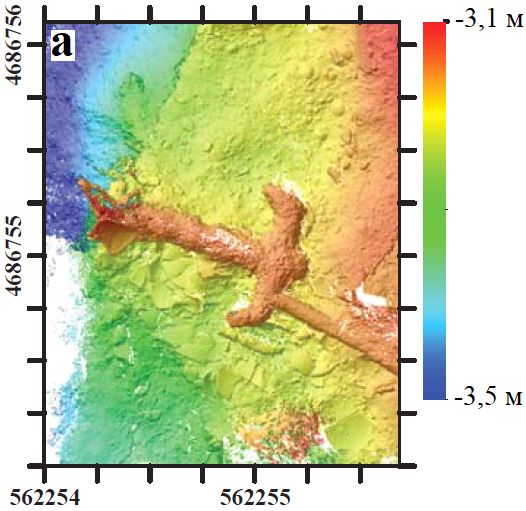
На основе этого удалось построить более детальную стратиграфическую последовательность изучаемого места, связанную с событиями прошлого, что, в свою очередь, помогло объяснить многопериодное заселение Ропотамо. Наглядный пример этого можно увидеть на рисунке 14, где показаны различные этапы раскопок вокруг византийского якоря в раскопе 2. Из полученной четырехмерной модели видно, что якорь попал в это место, когда гавань все еще использовалась, поскольку видно, что он лежит на плотном слое антропогенного материала, состоящего преимущественно из керамики (рис. 14, а). По бокам якоря и над ним отложено еще большее количество керамического материала, что предполагает постоянное использование этой зоны в течение византийского периода (рис. 14, б). Еще выше отложен тонкий слой морского песка, который свидетельствует об этапе заброшенности участка (рис. 14, в). Таким образом, путем виртуального снятия слоев на каждом этапе раскопок можно было гораздо более детально понять археологический контекст отложений, чем при простой регистрации особенностей поверхности участка до и после процесса раскопок.
ЗАКЛЮЧЕНИЕ
В этой статье продемонстрирована применимость фотограмметрической съемки в условиях плохой видимости (менее 0,5 м) для ежедневного документирования процесса археологических раскопок под водой.
В публикации приводятся доводы в пользу использования таких наборов данных для создания пространственно-временных моделей в целях улучшения понимания сложной природы отложений антропогенных материалов. Использование четырехмерных наборов данных необходимо для создания инструментов для их интерпретации, что, в свою очередь, помогает принимать более обоснованные решения по процессу археологических раскопок.
Таким образом, подводные раскопки в заливе Ропотамо в болгарской части Черного моря продемонстрировали, что четырехмерная регистрация хода археологических раскопок может иметь множество преимуществ при получении археологической информации.
Одной из наиболее важных была возможность проследить этапы раскопок, пересмотреть используемые методы и, что наиболее важно, взаимосвязь между археологическими элементами на участке.
Таким образом, использование мощных компьютерных технологий и сбор изображений с высоким разрешением позволяет получить гораздо более богатое пространственно-временное представление результатов подводных археологических раскопок в условиях плохой видимости.
-
Авторы хотели бы поблагодарить трест Джулии и Ханса Раузинг и их образовательно-исследовательский фонд (EEF) за дальновидное финансирование и поддержку проекта Black Sea MAP и такой его части, как раскопки в Ропотамо. Команда проекта Black Sea MAP была создана на основе партнерства между Центром морской археологии в Саутгемптоне и Центром подводной археологии в Созополе, а также Институтом морских археологических исследований в Содерторне и Университетом Коннектикута. Производственными партнерами, предоставившими платформу для разработки методологии, были компании MMT, CaTHX и Agisoft. Команда также благодарна всем болгарским властям и администрациям, которые сделали эту работу возможной.
ИСТОЧНИК ДЛЯ ПЕРЕВОДА
Pacheco-Ruiz R., Adams J., Pedrotti F. 4D modelling of low visibility underwater archaeological excavations using multi-source photogrammetry in the Bulgarian Black Sea // Geological and Environmental Engineering (international journal). World Academy of Science, Engineering and Technology, 2018. Vol. 12. № 4. URL: zenodo.org/record/1316478#.Y1gy4qBBxkg; publications.waset.org/search?q=
4D+modelling+of+low+visibility+underwater+archaeological+excavations+using+multi-source+photogrammetry+in+the+Bulgarian+Black+Sea.
СПИСОК ЛИТЕРАТУРЫ, ИСПОЛЬЗОВАННОЙ АВТОРАМИ ПЕРЕВЕДЕННОЙ СТАТЬИ
- Bass G.F. Archaeology under water // Ancient peoples and places. New York, 1966.
- Green J. Maritime archaeology: a technical handbook. Academic Press, 1990. 282 p.
- Rule M. The Mary Rose: The Excavation and Raising of Henry VIIIs Flagship. London: Conway Maritime Press, 1982. 224 p.
- Rule N. Some techniques for cost-effective three-dimensional mapping of underwater sites // BAR International Series. 1995. Vol. 598. P. 51.
- Karayotov I. The Antique and Medieval port at the mouth of the river Ropotamo // Acta TAB. 1990. Vol. 5. P. 64–66.
- Lister C.J., Hiscott R.N., Aksu A.E., Mudie P.J. Compositional trends through the Holocene mud succession of the southwestern Black Sea shelf: implications for sedimentary provenance and water-level history // Sedimentary Geology. 2015. Vol. 316. P. 13–25.
- Lericolais G., Bourget J., Popescu I., Jermannaud P., Mulder T., Jorry S., Panin N. Late Quaternary deep-sea sedimentation in the western Black Sea: new insights from recent coring and seismic data in the deep basin // Global and Planetary Change. 2013. Vol. 103. P. 232–247.
- Bruckner H., Kelterbaum D., Marunchak O., Porotov A., Vott A. The Holocene sea level story since 7500 BP lessons from the Eastern Mediterranean, the Black and the Azov Seas // Quaternary International. 2010. Vol. 225. № 2. P. 160–179.
- Yanko-Hombach V., Gilbert A.S., Dolukhanov P. Controversy over the great flood hypotheses in the Black Sea in light of geological, paleontological, and archaeological evidence // Quaternary International. 2007. Vol. 167-168. P. 91–113.
- Popescu I., Lericolais G., Panin N., Normand A., Dinu C., Le Drezen E. The Danube submarine canyon (Black Sea): morphology and sedimentary processes // Marine Geology. 2004. Vol. 206. № 1-4. P. 249–265.
- Aksu A.E., Gillespie H., Mudie P.J. Dino flagellate cysts, freshwater algae and fungal spores as salinity indicators // Late Quaternary cores from Marmara and Black Seas. 2002. Vol. 190. № 1-2. P. 203–231.
- Aksu A.E., Hiscott R.N., Ya D. Oscillating Quaternary water levels of the Marmara Sea and vigorous outflow into the Aegean Sea from the Marmara Sea Black Sea drainage corridor // Environmental Science, Geography. Marine Geology. 1999. Vol. 153. P. 275–302.
- Ryan W.B.F., Pitman W.C., Major C., Shimkus K., Moskalenko V., Jones G.A., Dimitrov P., Goriir N., Saking M., Yiice H. An abrupt drowning of the Black Sea shelf // Marine Geology. 1997. Vol. 138. № 1. P. 119–126.
- McCarthy J., Benjamin J. Multi-image photogrammetry for underwater archaeological site recording: an accessible, diver-based approach // Journal of Maritime Archaeology. 2014. Vol. 9. № 1. P. 95–114.
- Beltrame C., Costa E. 3D survey and modelling of shipwrecks in different underwater environments // Journal of Cultural Heritage. 2017. Vol. 29. P. 82–88.
- Barkai O., Kahanov Y., The Tantura F Shipwreck, Israel // International Journal of Nautical Archaeology. 2007. Vol. 36. № 1. P. 21.
- Eliyahu M., Barkai O., Goren Y., Eliaz N., Kahanov Y., Ashkenazi D. The iron anchors from the Tantura F shipwreck: typological and metallurgical analyses // Journal of Archaeological Science. 2011. Vol. 38. № 2. P. 233–245.
- Rule N. The Direct Survey Method (DSM) of underwater survey, and its application underwater // International Journal of Nautical Archaeology. 1989. Vol. 18. № 2. P. 157–162.
Журнал остается бесплатным и продолжает развиваться.
Нам очень нужна поддержка читателей.
Поддержите нас один раз за год
Поддерживайте нас каждый месяц