Геодезические системы будущего: как беспилотники развивают геодезию в России

Промышленное использование дронов в геодезии на сегодняшний день является повсеместной практикой. Особенно это важно в нашей стране, где вопрос транспортной доступности многих территорий стоит очень остро.
Уровень технического развития компонентов БВС и программного обеспечения для работы с ними сейчас делает дроны эффективным решением на рынке по критерию материальных и временных затрат и получаемого результата.
На сегодняшний день беспилотные воздушные системы (БВС) используются в сельском хозяйстве, картографии, строительстве, геодезии и многих других сферах. И это неудивительно, ведь технологические преимущества дронов позволяют оперативно выполнять мониторинг и съемку больших пространств или труднодоступных объектов без дополнительных финансовых затрат.
В строительной отрасли съемка с дрона является важнейшим этапом подготовительных работ на участке земли, предназначенном для размещения будущих объектов: зданий, железных и автомобильных дорог, тоннелей, гидротехнических сооружений. Специалистами производятся замеры, создаются трехмерные модели рельефа, а также могут наноситься на карту высококачественные снимки территории.
Дроны и фотограмметрия
Одним из способов определения координат в геодезии является фотограмметрический метод. В его основе лежит работа с фотографиями объекта, сделанными с разных ракурсов, что позволяет создавать трехмерные модели ландшафта. Большим прорывом в фотограмметрическом методе стала возможность делать снимки с воздуха, однако до недавнего времени единственным способом получения такого материала была малая авиация, что сопряжено с большими расходами и организационными трудностями.
Дроны позволяют работать на сложном рельефе и получать необходимую информацию в меньшие сроки, не подвергая при этом опасности людей. Современные камеры делают кадры высокой четкости при использовании 32-кратного зума, а встроенный модуль RTK обеспечивает привязку кадров к местности в реальном времени с сантиметровой точностью.
Благодаря устойчивому сигналу система передачи данных может направлять видеосигнал на расстояние до 15 километров, а система управления позволяет оператору задавать дрону схему полета заранее, не отвлекаясь на управление в ходе миссии. Всё это позволяет вывести фотограмметрию в геодезии на новый уровень работы. Этому способствует развитие программного обеспечения и получаемые с БВС данные.
Существуют объекты, на которые доступ может быть ограничен по соображениям безопасности. Дистанционное использование дронов, а также фотограмметрический метод обработки данных позволяет работать без прямого взаимодействия с объектом. На таких миссиях активно используется метод мониторинга с прямым геопозиционированием, который позволяет определять точное положение объектов на основании известных координат центров фотографирования.
О точности данных
Точность определения координат модели состоит из трех частей.
Формула среднеквадратической погрешности для определения координат методом прямого геопозиционирования в аэрофотосъёмке имеет следующий вид:
m^2= m_внеш^2+m_внутр^2+m_расп^2, (1)
где m_внеш^2 — среднеквадратическая погрешность, образованная ошибкой внешнего ориентирования, то есть позиционирования дрона в пространстве, и измерения углов наклона фотокамеры; m_внутр^2 — среднеквадратическая погрешность, образованная ошибкой в исходных параметрах внутреннего ориентирования камеры, а m_расп^2 – ошибки распознавания точек на фотограмметрической модели.
Соответственно, ошибки внешнего ориентирования камеры могут быть представлены в следующем формате:
m_внеш^2= [m]_XYZ^2 + m_ωφк^2, (2)
где m_XYZ^2 — среднеквадратическая погрешность определения координат центров фотографирования, а m_ωφк^2 — среднеквадратическая погрешность определения углов наклона фотоизображения.
Таким образом, мы получаем формулу среднеквадратической погрешности для определения координат методом прямого геопозиционирования в аэрофотосъёмке следующего вида:
m^2= m_XYZ^2+m_ωφк^2+ m_внутр^2+ m_расп^2 (3)
При этом красным цветом в ней выделены те компоненты, которые могут быть проигнорированы, т.к. современные системы фотограмметрической обработки фотоизображений при работе с исходными данными позволяют уточнить углы наклона фотографии и параметры внутреннего ориентирования до такого предела, что их влияние на конечный результат в определении координат методом прямого геопозиционирования стремится к нулю. В таком случае остаются лишь два фактора, формирующих погрешность в измерениях: ошибка в определении координат центров фотографирования и ошибка распознавания точки в самой фотограмметрической модели.

Средняя квадратическая погрешность определения положения дроном относительно своего местоположения составляет 10-20 мм базовой погрешности + 1 мм на каждый километр удаления беспилотника от базовой станции. Средняя квадратическая ошибка в определении БВС своего положения в глобальной системе координат при расстоянии до базовой станции 5 километров не должна превышать 25 мм.
m_XYZ= m_RTK=10-20(мм)+1(мм) х S(км) (4)
Основное влияние на корректность определения координат методом прямого геопозиционирования при использовании фотограмметрии имеет точность распознавания изначальной точки на фотоизображениях. Увеличивая число изображений, на которых распознается (или измеряется) точка, оператор может повысить точность определения координат. При выполнении рекомендованных условий ожидаемая точность определения координат соотносится с разрешением фотоснимка и составляет примерно 1хGSD — в плане и 1,5-2хGSD — по высоте (GSD — ground sample distance — это расстояние между центрами двух соседних пикселей, спроецированное на землю).
Пример из практики
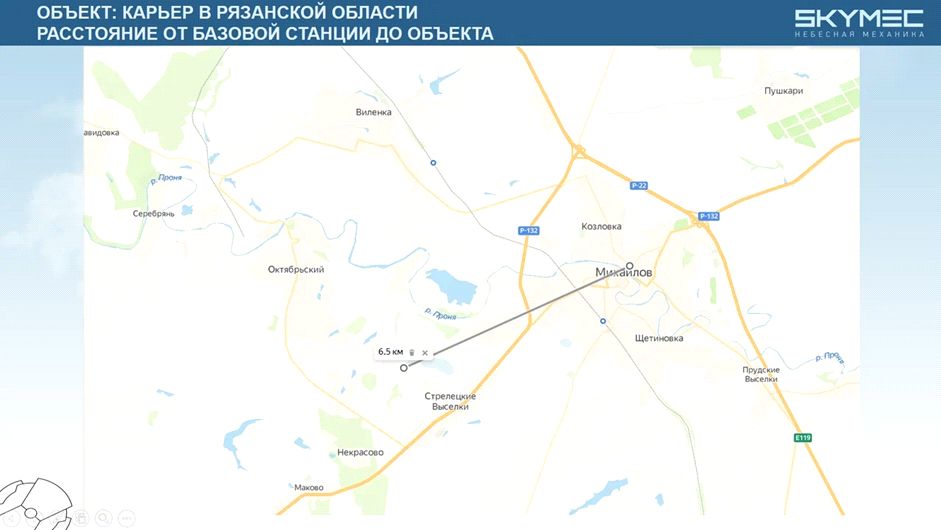
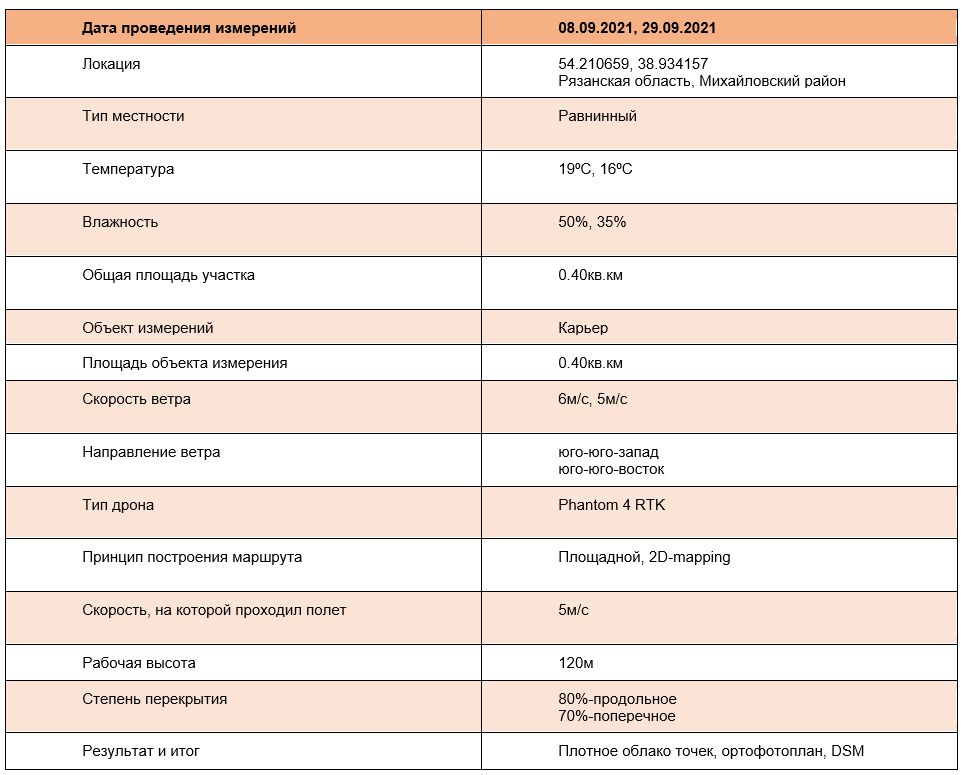
В России есть множество примеров применения дронов для определения координат объекта методом прямого геопозиционирования, одним из которых является кейс, проведенный компанией Skymec с использованием БВС Phantom 4RTK в карьере в Рязанской области. Специалисты при помощи беспилотников создали фотограмметрическую модель ландшафта. С высоты 120 метров при удалении от базовой станции на 6 километров получена трехмерная модель карьера с разрешением снимков 3 сантиметра на пиксель. По этой модели сразу же построены в режиме онлайн трехмерные полилинии, отправленные в дальнейшем в обработку в AutoCAD. Там трехмерная модель была сравнена с такой же моделью, сделанной тремя неделями ранее, для визуализации динамики изменения рабочего участка. Такой формат использования актуален для объектов, где динамика изменения ландшафта высока, а оперативность ее отслеживания и контроля имеет приоритет над точностью.
Заключение
Таким образом, промышленное использование дронов в геодезии стало повсеместной практикой, особенно в нашей стране, где вопрос транспортной доступности и обширности территории стоит остро. Уровень технического развития компонентов БВС и программного обеспечения для работы с ними сейчас делает дроны эффективным решением на рынке по критерию материальных и временных затрат и получаемого результата.
Таблица 1.
Журнал остается бесплатным и продолжает развиваться.
Нам очень нужна поддержка читателей.
Поддержите нас один раз за год
Поддерживайте нас каждый месяц