Предварительные археологические изыскания с помощью лидара, прикрепленного к дрону

Предлагаем вниманию читателей немного сокращенный адаптированный перевод статьи «Предварительные археологические изыскания с помощью лидара, прикрепленного к дрону». Эта работа была написана итальянскими исследователями Марко Бальси, Сальваторе Эспозито, Паоло Фаллаволлита, Марией-Грацией Мелис и Марко Миланезе и опубликована в 2021 году в журнале Remote Sensing («Дистанционное зондирование»). Она находится в открытом доступе на сайте издательства MDPI (Multidisciplinary Digital Publishing Institute – «Многопрофильный институт цифровых публикаций») и распространяется по лицензии Creative Commons Attribution (CC BY), которая разрешает ее неограниченное использование (даже в коммерческих целях), воспроизведение, распространение, перевод и адаптацию при условии указания ссылки на первоисточник. В нашем случае ссылка имеется в конце статьи.
Предварительный анализ мест возможного расположения археологических памятников требует получения информации с помощью нескольких разных диагностических методов. В том числе важную роль играет дистанционное зондирование, особенно при обследовании больших территорий и труднодоступных мест, в целях сохранения археологических объектов, их пространственного анализа, реконструкции ландшафтов, в которых ранее обитал человек, определения его взаимосвязей с окружающей средой, а также для планирования тех или иных мероприятий (прежде всего строительства) в исследуемых районах. В переведенной статье представлен конкретный пример детальной топографической съемки с помощью лидара, установленного на беспилотном летательном аппарате. Полученная в результате цифровая модель рельефа с высоким разрешением была тщательно изучена опытным специалистом в поисках входов в доисторичекие подземные помещения. Выполненное исследование демонстрирует полезность указанного метода для выявления антропогенных объектов, скрытых под растительным покровом, и для быстрого топографического обследования поверхности земли.
Введение
До начала научных раскопок или земляных работ при строительстве на территории, которая не является изученной в отношении присутствия археологических объектов или изучена лишь частично, сначала необходим предварительный анализ на основе данных, полученных с помощью комплексного использования различных неинвазивных методов [5, 10]. Это значительно сэкономит время и деньги и не нанесет вреда возможным памятникам археологии [2, 9, 13], а также поможет их пространственному анализу, реконструкции ландшафтов, в которых ранее обитал человек, определению его взаимосвязей с окружающей средой, а также планированию тех или иных мероприятий в исследуемых районах [3, 4].
Важную роль в таких предварительных исследованиях играет дистанционное зондирование, особенно на больших площадях. Оно может проводиться в различных масштабах, в частности со спутников, самолетов и беспилотных летательных аппаратов (БПЛА, дронов).
Цели такого дистанционного зондирования – это получение информации по топографии (морфологии, альтиметрии, гидрографии), растительному покрову, землепользованию, а также обнаружение и описание искусственных сооружений и результатов других антропогенных вмешательств в окружающую среду (дорог, террас, канав, карьеров и пр.), находящихся на поверхности земли или под ней.
В основном используются изображения в видимом свете, но все более важную роль играет и инфракрасный спектр, а также мультиспектральные и гиперспектральные данные [7]. В том числе используется радиолокационный метод с помощью радаров (систем для обнаружения и определения расстояний с помощью волн радиодиапазона – Radio Detection and Ranging, RADAR) со спутников, самолетов и даже с низколетящих БПЛА [1, 6, 18, 21].
Точную топографическую и морфологическую информацию можно получить и с помощью лидаров (систем для обнаружения и определения расстояний с помощью волн ультрафиолетового, видимого или инфракрасного диапазона – Light Identification, Detection and Ranging, LIDAR), также известных как сканирующие лазерные дальномеры. 3D-лидары наземного базирования хорошо зарекомендовали себя при получении подробной 3D-информации. А лидары бортового базирования имеют дополнительные преимущества, особенно для предотвращения помех из-за препятствий или недосягаемости удаленных объектов, а также для получения ценной информации, частично или даже полностью скрытой под растительным покровом. Последнее оказалось особенно важным для предварительных археологических обследований на больших территориях [8], а также весьма полезным при исследованиях среднего и мелкого масштаба [19, 21].
Например, Мойес и Монтгомери [17] использовали данные лидара воздушного базирования специально для поиска входов в пещеры, в том числе скрытых под растительным покровом, и смогли доказать, что такой метод особенно полезен и экономически выгоден для обнаружения признаков возможного присутствия интересующих объектов. Он фактически сводится к довольно быстрому виртуальному исследованию поверхности даже в труднодоступных районах. К тому же некоторые интересные особенности, которые можно распознать сверху, могут быть незаметны на уровне земли.
Такая предварительная съемка не может полностью заменить прямое наблюдение, но она играет важную роль для выбора потенциально интересных мест, методов и приоритетов при последующих наземных исследованиях.
В этой статье представлен практический пример использования данных лидара на БПЛА при предварительном обследовании территории со скрытыми растительностью искусственными полостями, интересными с точки зрения археологии.
Материалы и методы
Чтобы оценить возможности лидара на БПЛА для обнаружения и регистрации скрытой под растительным покровом морфологии, связанной с археологическими объектами, был обследован участок, который уже несколько лет является местом раскопок и наземных исследований, но до сих пор информация по нему не задокументирована полностью. Преимущество работы на такой территории для экспериментального проекта заключается в том, что некоторые представляющие интерес объекты (в данном случае входы в подземные помещения) все еще скрыты от глаз и не затронуты никаким археологическим вмешательством. Но результаты изысканий с помощью лидара воздушного базирования можно было потом проверить при непосредственном обследовании поверхности земли.
Рассматриваемый участок (С’Элиге Энтосу) расположен в районе Усини провинции Сассари на севере итальянского острова Сардиния. Там находится некрополь периода неолита, созданный в 4000 –3500 гг. до н. э. и включающий три небольшие группы высеченных в скальных породах гробниц, повторно использовавшихся в разные доисторические и протоисторические периоды, во времена Древнего Рима и даже в недавнее время. Археологические исследования также выявили наличие некрополя времен Римской республики и Римской империи и обнаружили постримскую каменоломню в 80 м к западу от гробниц III и IV [15, 16].
Была обследована определенная область на краю скалистого плато, который образует уступ с видом на неглубокую долину (рис. 1). Вдоль известняковой стены, измененной за долгое время эрозией и обвалами, присутствуют неолитические гробницы, а также полости, использовавшиеся в более поздние времена, в том числе сравнительно недавно созданный резервуар для воды. Поверхность скальных пород частично обнажена, а частично покрыта растительностью – в основном низким густым кустарником и небольшими деревьями. Такие характеристики исследуемого участка подчеркивают его труднодоступность и сложность съемки с поверхности земли. Более того, они делают достаточно сложным и применение дистанционного зондирования, поскольку тип присутствующей растительности, особенно невысокие густые кустарники, типичные для прибрежной средиземноморской дикой природы, не просвечиваются с помощью лидара или других инструментов дистанционного зондирования. С другой стороны, представляющая интерес территория довольно мала, поэтому для нее можно получить детальные данные и вручную.

Представляющими интерес объектами, как и в примере из работы [17], являются полости под землей (пещеры или небольшие помещения, частично или полностью искусственно вырытые). Их наличие выявляется снаружи по входам в них, которые представляют собой либо короткие горизонтальные тоннели, открывающиеся на вертикальных или почти вертикальных скальных поверхностях, либо коридоры (дромосы) которые выглядят как прямые траншеи с вертикальными стенками, которые утратили (или никогда не имели) свои кровли. Поэтому полезными индикаторами в данном случае являются вертикальные стенки (чаще всего естественные и/или неотличимые от естественных) и отверстия, которые выглядят искусственными из-за их формы и характеристик (с учетом того, что выветривание и эрозии за многие столетия видоизменили их).
Съемка выполнялась с помощью лидара Yellowscan Mapper (производства французской компании Yellowscan), установленного на октокоптере (дроне с 8-ю пропеллерами) диаметром 1,8 м производства китайской фирмы Foxtech (рис. 2). Датчик интегрирован с точным инерциальным блоком и блоком глобальной навигационной спутниковой системы GNSS, который принимает сигналы глобальных навигационных систем GPS и ГЛОНАСС и имеет улучшенное позиционирование на основе кинематики в реальном времени (RTK) или кинематики с постобработкой (PPK). Точность позиционирования каждой точки – лучше 10 см, при этом разброс (точность) в случае нормальных условий работы составляет около 40 см. Выбранный профиль полета позволил получить в среднем 63 точки/кв. м, что соответствует среднему расстоянию между точками 13 см. Датчик лидара обнаруживает до трех отраженных сигналов на излученный импульс, что позволяет даже при наличии растительности получать в том числе и сигналы, отраженные от точек на поверхности земли, причем достаточно плотно расположенных, даже если эта поверхность не видна на фотографиях и не может быть смоделирована с помощью фотограмметрии.

Компания Yellowscan предоставляет независимо компилируемый программный модуль, динамически подключаемый к свободной (бесплатной, с открытым исходным кодом) кроссплатформенной геоинформационной системе QGIS для предварительной обработки записанных датчиком данных и получения облака точек, то есть плотного набора точек с точной географической привязкой, составляющих 3D-модель обследуемой поверхности. Облака точек можно наблюдать и анализировать с помощью подходящего программного обеспечения, в частности Cloud Compare, а также используя бесплатные (например, FugroViewer) или коммерческие (например, LAStools, Terrasolid) программы.
Полеты БПЛА с лидаром происходили над еще недостаточно изученными участками, на которых, возможно, имелись входы в подземные помещения, а также над труднодоступными местами. На рисунке 1 показаны две области, выделенные на основе необработанных лидарных данных для последующего всестороннего детального анализа.
Полученные результаты
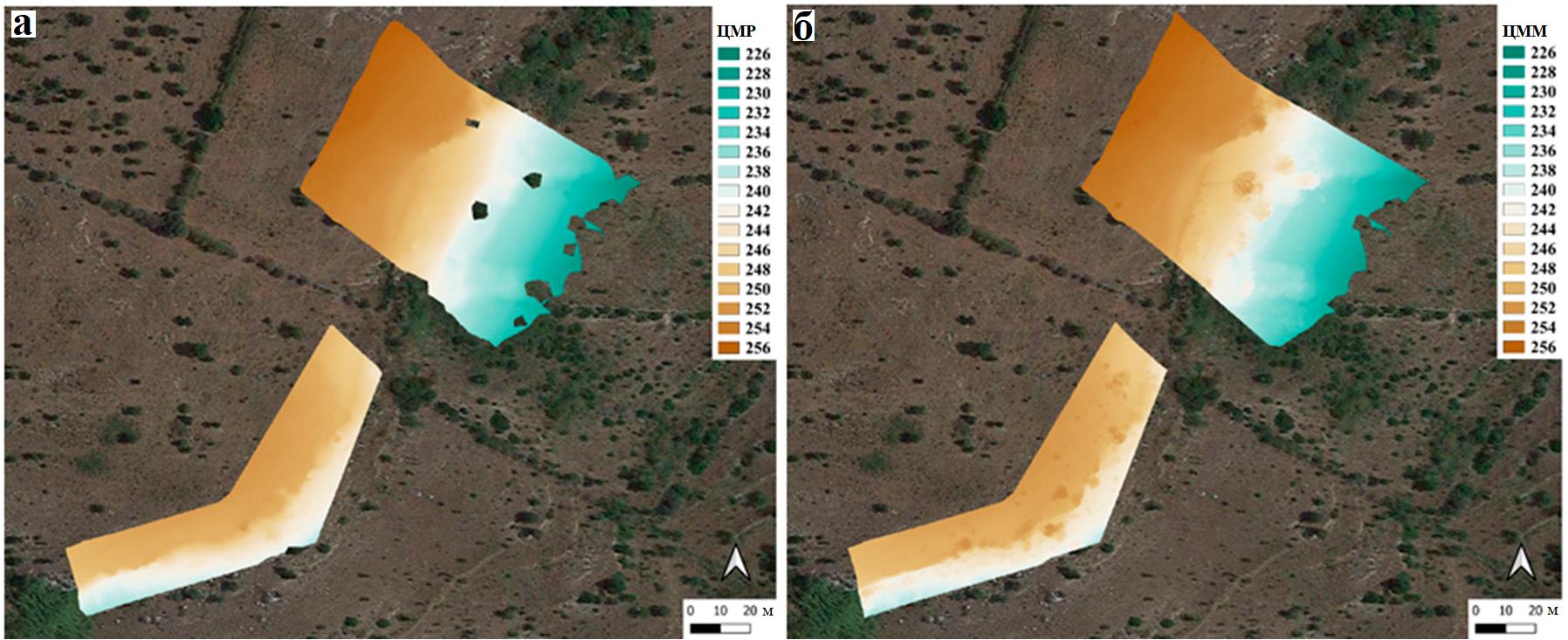
Полученное облако точек (внесенное в общедоступную базу данных [11]) было проанализировано путем тщательного поиска входов в подземные помещения или пещеры, древних построек или других артефактов. Чтобы сосредоточиться на поверхностях, скрытых под растительным покровом, было, как обычно в таких случаях, выполнено разделение точек отражений лазерных импульсов на наземные и неназемные с использованием стандартных автоматических методов, например в программных пакетах LAStools или Terrasolid. По точкам на поверхности земли можно получить карту рельефа поверхности на регулярной сетке (растровую). Это цифровая модель рельефа (ЦМР). На рисунке 3, а представлены плотные ЦМР, полученные при размере ячеек сетки 0,2 м. Сравнение этих моделей с цифровыми моделями местности (ЦММ), полученными с использованием всех точек облака, показывает, что бОльшая часть растительности была правильно распознана и отфильтрована для выделения наземных точек.
Мойес и Монтгомери [17] предложили использовать индикатор, позволяющий автоматически выделить те области, которые, возможно, интересны для дальнейшего исследования (локальное моделирование рельефа, ЛМР – Local Relief Modeling, LRM). Это в основном получается путем вычитания сглаженной версии ЦМР из исходной ЦМР, чтобы выделить более резкие неоднородности, которые являются типичными признаками, описывающими искусственные структуры. Этот метод не сводится к автоматическому распознаванию интересующих объектов, но полезен для привлечения внимания опытного специалиста по анализу данных, который в любом случае должен работать с ними вручную.
Авторы настоящей работы вместе с зонами ЛМР извлекли из полученной ЦМР несколько индикаторов, в том числе индекс топографического положения [12] и индекс неровности рельефа [20]. Ни один из этих индикаторов не оказался особо эффективным в этом конкретном исследовании на уровне детализации полученных данных, потому что представляющие интерес особенности были слишком похожи друг на друга и на более очевидные природные объекты (в частности, на естественный скальный уступ), поэтому было неизбежным большое количество ложных ожиданий. Тем не менее локальное моделирование рельефа действительно помогло выделить интересные места, которые показаны на рисунке 4.
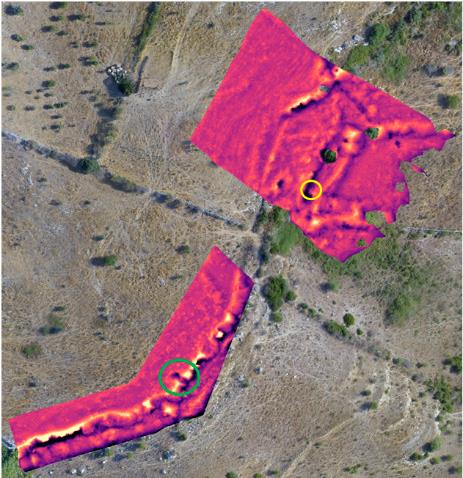
Рис. 4. Важным этапом локального моделирования рельефа (ЛМР) является определение разницы между исходной цифровой моделью рельефа (ЦМР) и ее сглаженной версией для выделения резких переходов (неоднородностей). Здесь показан результат такой операции, где ложные цвета переходят от черного/синего для отрицательных разностей (когда исходная ЦМР ниже, чем ее сглаженная версия) до желтого/красного для положительных разностей (когда исходная ЦМР выше, чем сглаженная версия). Наиболее значительные аномалии появляются на естественной скальном уступе, причем одно конкретное место (участок № 1, обведенный зеленой окружностью) действительно указывает на наличие объекта, представляющего интерес. Но другое представляющее интерес место, которое было обнаружено с помощью анализа облака точек (участок № 2, обведенный желтой окружностью), не выделяется явно, поскольку его легко спутать со скальным уступом (краем скалистого плато)
Изучив детали соответствующего места, выделенного при ЛМР, авторы данного исследования смогли увидеть по точкам отражений импульсов лидара, что под небольшим деревом имеется углубление в земле (рис. 5).

Поскольку артефакты, подобные этим, имеют довольно неопределенные форму (особенно после столетий эрозии), метод, использовавшийся для изучения данных, был основан на получении скользящих вертикальных сечений облака точек примерно вдоль или поперек склона и на поиске видимых аномалий.
На рисунках 6 и 7 показаны разрезы облака точек для участков 1 и 2 (см. рис. 4), полученные в приложении FugroViewer. Наземные точки окрашены в фиолетовый цвет, а неназемные – в желтый. В обоих случаях явно видно присутствие резкой неоднородности (соответствующей вертикальной стенке, которая не дает отражений импульсов, поданных сверху) и полости под кустами. Отметим, что на вставках справа на рисунках 6 и 7 показаны линии разрезов, идущие по поверхности грунта. Эти разрезы были сделаны достаточно небольшими, чтобы улучшить изображения для демонстрации в данной статье. Однако поиск археологических объектов выполнялся путем тщательного исследования разрезов, взятых в нескольких направлениях через весь объем облака точек с использованием удобной функции FugroViewer, которая позволяет очень легко перемещать положение сечения с помощью колесика мыши.
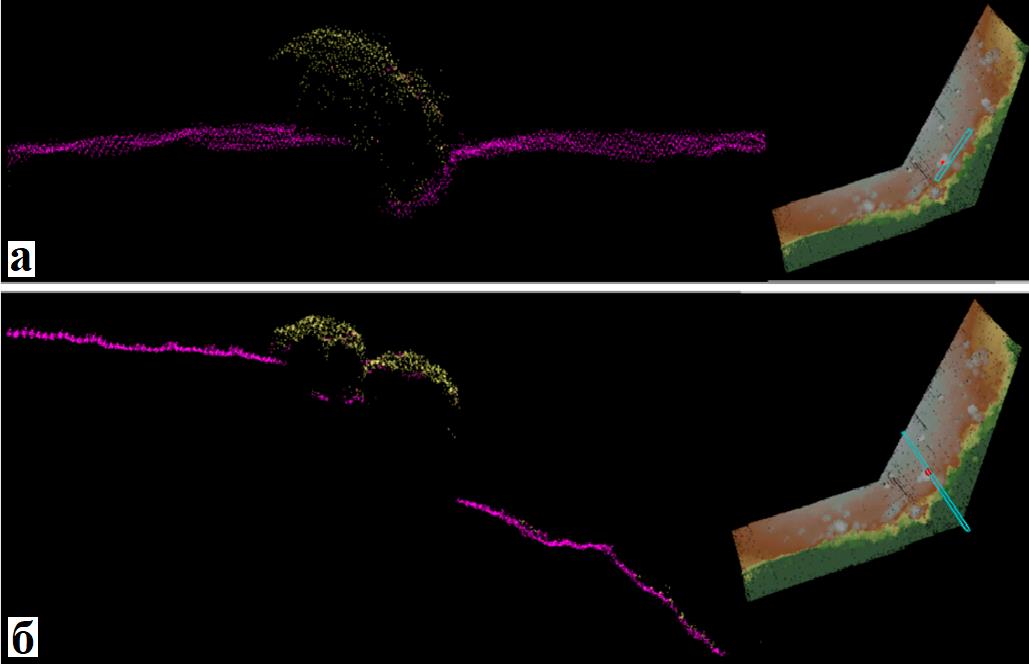
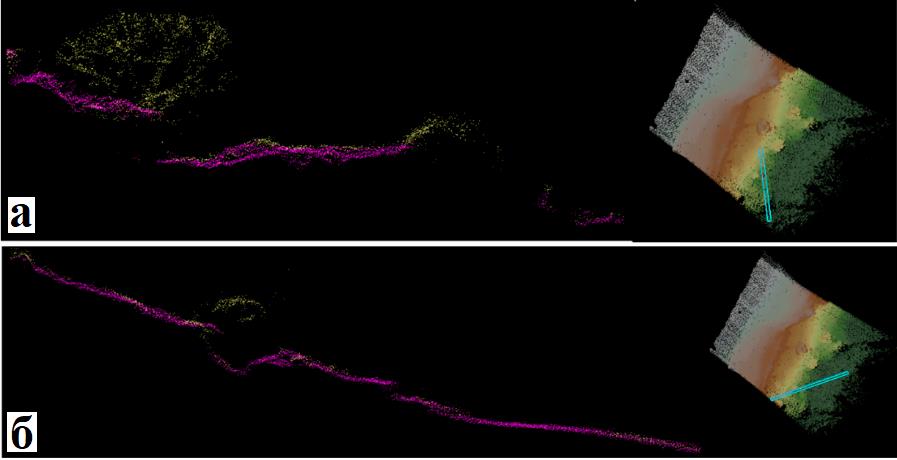
Следует отметить, что некоторые точки были ошибочно автоматически распознаны как наземные или неназемные. Однако цвет точек был предназначен лишь для помощи аналитику данных, который в любом случае должен был вручную провести всесторонний поиск форм и признаков, которые не могут быть достаточно стандартизированы для автоматического распознавания.
Места расположения полостей, выявленные в результате такого анализа, были затем использованы для наземных обследований. Участок № 1 действительно является известным входом в гробницу VIII и расположен в месте, вызвавшем интерес при воздушном лазерном сканировании и выделенном на рисунке 4 (и хорошо видном на рисунке 5, в). На рисунке 8 показаны две фотографии этого участка, сделанные с земли. Видно, что искомая полость почти незаметна даже вблизи, поскольку в основном покрыта густым кустарником и более низкими растениями, выглядывающими также изнутри полости.

На участке № 2 имеется относительно недавно созданный резервуар для воды рядом с небольшой пещерой, частично закрытой стенкой из каменной кладки, построенной без раствора, двумя бочками и панелью. Даже если он не представляет археологического интереса, он является искусственным сооружением и, соответственно, кандидатом на исследование. Отметим, что этот резервуар расположен в левом нижнем углу рисунка 9 и почти полностью скрыт под растительностью.

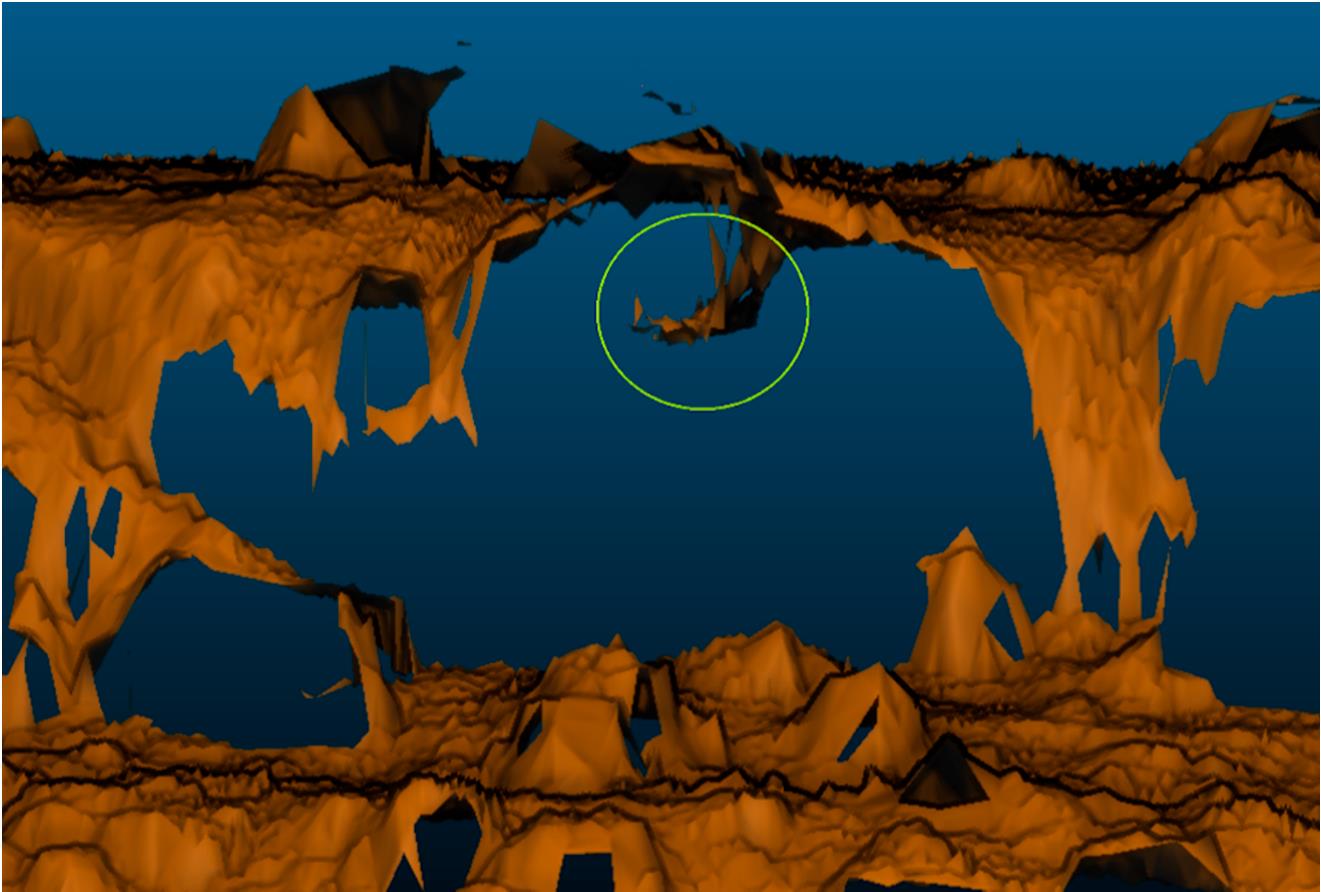
Другой способ изучения данных заключается в создании ячеистой структуры из точек облака, помеченных как наземные. Таким образом также можно исследовать поверхность под растительным покровом, чтобы найти вызывающие интерес участки. Конечно, полученное таким образом изображение поверхности является неполным, а некоторые точки отнесены к наземным ошибочно (особенно там, где густой кустарник простирается до самой земли, что частично вводит алгоритм в заблуждение, заставляя его считать землю единственной поверхностью, которая фактически присутствует в этом облаке точек. Тем не менее такие изображения в некоторых случаях могут сделать поверхностные аномалии более очевидными по сравнению с разрезами. Это относится, например, к участку № 1, как видно из рисунка 10.
Обсуждение результатов
Представленный в статье пример – это экспериментальная съемка с помощью лидара, установленного на дроне, для предварительного археологического обследования в относительно сложных условиях, когда небольшие и геометрически неправильные артефакты покрыты густым кустарником.
Анализ полученных облаков точек выполнялся вручную путем тщательного исследования разрезов этих облаков. Даже если не было возможности использовать алгоритм автоматического обнаружения, изучение лидарных данных было значительно проще и быстрее, чем наземное обследование территории. Конечно, результаты анализа данных воздушного лазерного сканирования требуют проверки путем непосредственного осмотра, но, как подтвердило выполненное исследование, этот осмотр становится более эффективным после такого анализа.
Однако в рассмотренных в данной статье условиях интересующие особенности оказались едва уловимыми, их было трудно однозначно охарактеризовать и было легко спутать с природными объектами. По этой причине авторы статьи прибегли к экспертному изучению топографических деталей, но обобщение стадии выявления интересующих объектов в данном конкретном случае оказалось труднодостижимым.
Дальнейшее развитие этого исследования будет направлено на такое улучшение методологии, чтобы сделать ее более автоматической и применимой к различным ситуациям (например, обеспечить выбор объективных характеристик, связанных с искусственными структурами, и использовать машинное обучение).
В тех случаях, когда целью изысканий является обнаружение объектов более четкой формы (дорог, троп, следов стен, более крупных углублений и т. д.), анализ сетки наземных точек может частично или полностью проводиться автоматически, а не вручную, например путем изучения карт градиентов, полученных по сетке (то есть по цифровой модели рельефа на ее основе). С другой стороны, для использования методов глубокого структурированного машинного обучения требуется большая база данных для относящихся к делу случаев, которая не была доступна на рассмотренном этапе.
Поверхность земли, «извлеченная» из результатов лидарной съемки, представляет собой наилучшие исходные топографические данные для поддержки получения информации с помощью других инструментов дистанционного зондирования, наземных съемок или непосредственных измерений, которые также направлены на создание BIM-модели исследуемой площадки. Цифровая модель рельефа, полученная с помощью лидара воздушного базирования, очень точна (ошибка позиционирования составляет порядка 0,1 м) и описывает местность точнее, чем фотограмметрическая 3D-модель, в то время как было бы очень полезно интегрировать последнюю в ЦМР для обеспечения более высокого разрешения визуализированных данных.
Заключение
В данной статье был описан пример предварительного экспериментального обследования территории, частично изученной в археологическом отношении (но рассматривавшейся как неизученная), с помощью лидара, установленного на БПЛА. Эта съемка охватила несколько гектаров менее чем за полчаса. После этого в течение нескольких часов выполнялись предварительная обработка и анализ данных.
Проведенное исследование доказало, что лидар на дроне может быстро и довольно легко предоставить очень полезную исходную информацию для обнаружения скрытых искусственных структур. При этом повысить качество анализа и достоверность интерпретации может интеграция лидарных данных с информацией, полученной с помощью других методов дистанционного зондирования, наземных съемок и непосредственных обследований.
Источник для сокращенного адаптированного перевода
Balsi M., Esposito S., Fallavollita P., Melis M.G., Milanese M. Preliminary archaeological site survey by UAV-Borne Lidar: a case study // Remote Sensing. 2021. Vol. 13. P. 332. DOI: doi.org/10.3390/rs13030332. URL: mdpi.com/2072-4292/13/3/332.
Список литературы, использованной авторами переведенной статьи
- Benner S.M., Brodkey R.S. Underground heat detection using differential heat analysis // Archaeometry. 1984. Vol. 26. P. 21–36.
- Bozoki-Ernyey K. European preventive archaeology. Budapest, Hungary: National Office of Cultural Heritage, 2007.
- Burgers G.L.M., Kluiving S.J., Hermans R.A.E. (eds.). Multi-inter- and transdisciplinary research in landscape archaeology // Proceedings of the 3rd International Landscape Archaeology Conference in Rome, Rome, Italy, 17–20 September 2014. Amsterdam, The Netherlands: University Library, Vrije Universiteit, 2016.
- Cambi F. Archeologia dei paesaggi antichi: fonti e diagnostica. Roma, Italy: Carocci, 2003.
- Campana S., Piro S. Seeing the unseen. London, UK: Taylor and Francis, 2009.
- Casana J., Kantner J., Wiewel A., Cothren J. Archaeological aerial thermography: a case study at the Chaco-era Blue J community, New Mexico // J. Archaeol. Sci. 2014. Vol. 45. P. 207–219.
- Cavalli R.M. Integrated approach for archaeological prospection exploiting airborne hyperspectral remote sensing // Good Practice in Archaeological Diagnostics. Cham, Switzerland: Springer, 2013. P. 87–112.
- Chase A.F., Chase D.Z., Weishampel J.F., Drake J.B., Shrestha R.L., Slatton K.C., Awe J.J., Carter W.E. Airborne LiDAR, archaeology, and the ancient Maya landscape at Caracol, Belize // J. Archaeol. Sci. 2011. Vol. 38. P. 387–398.
- Citter C. Arnolud-Huyzendeveld A. New approaches to old issues. The application of predictive maps in archaeology. A case study: modelling the location the Grosseto salt work from 700 BC to AD 1200 // Mediev. Settl. Res. 2012. Vol. 27. P. 1–11.
- Corsi C., Slapsak B., Vermeulen F. (eds.). Good practice in archaeological diagnostics: non-invasive survey of complex archaeological sites. Cham, Switzerland; Heidelberg, Germany; New York, NY, USA; Dordrecht, The Netherlands; London, UK: Springer, 2013.
- Data for paper “Preliminary archeological site survey by UAV-Borne LiDAR” // Mendeley Data. V1. The last accessed date: 18 January 2021. URL: https://data.mendeley.com/datasets/wbkky67dvc/2.
- De Reu J., Bourgeois J., Bats M., Zwertvaegher A., Gelorini V., De Smedt P.; Chu W., Antrop M., De Maeyer P., Finke P. et al. Application of the topographic position index to heterogeneous landscapes // Geomorphology. 2013. Vol. 186. P. 39–49.
- Gull P. Archeologia preventiva. Palermo, Italy: Dario Flaccovio Editore, 2015.
- Lopez F.J., Lerones P.M., Llamas J., Gomez-Garcнa-Bermejo J., Zalama E. A review of heritage building information modeling (H-BIM) // Multimodal Technol. Interact. 2018. Vol. 2. P. 21.
- Melis M.G. (ed.). Usini. Nuove ricerche a S’Elighe Entosu // Quaderni del LaPArS 2. Sassari, Italy: Universitа di Sassari, LaPArS, 2016.
- Melis M.G. (ed.). Usini. Ricostruire il passato. Una ricerca internazionale a S’Elighe Entosu. Sassari, Italy: Carlo Delfino Editore, 2010.
- Moyes H.; Montgomery S. Locating cave entrances using lidar-derived local relief modeling // Geosciences. 2019. Vol. 9. P. 98.
- Piga C., Piroddi L., Pompianu E., Ranieri G., Stocco S., Trogu A. Integrated geophysical and aerial sensing methods for archaeology: a case history in the punic site of Villamar (Sardinia, Italy) // Remote Sens. 2014. Vol. 6. P. 10986–11012.
- Poscetti V., Malatesta S.G., Cirilli V., Lella F., Rondinelli V., Esposito S., Balsi M. Preliminary results of the Castelmonardo project // Archeologia Calcolatori. 2017. Vol. 28. P. 391–402.
- Riley S.J., DeGloria S.D., Elliot R. A terrain ruggedness index that quantifies topographic heterogeneity // Intermt. J. Sci. 1999. Vol. 5. P. 23–27.
- Rowlands A., Sarris A. Detection of exposed and subsurface archaeological remains using multi-sensor remote sensing // J. Archaeol. Sci. 2007. Vol. 34. P. 795–803.
Журнал остается бесплатным и продолжает развиваться.
Нам очень нужна поддержка читателей.
Поддержите нас один раз за год
Поддерживайте нас каждый месяц